美研製蜈蚣型機械人
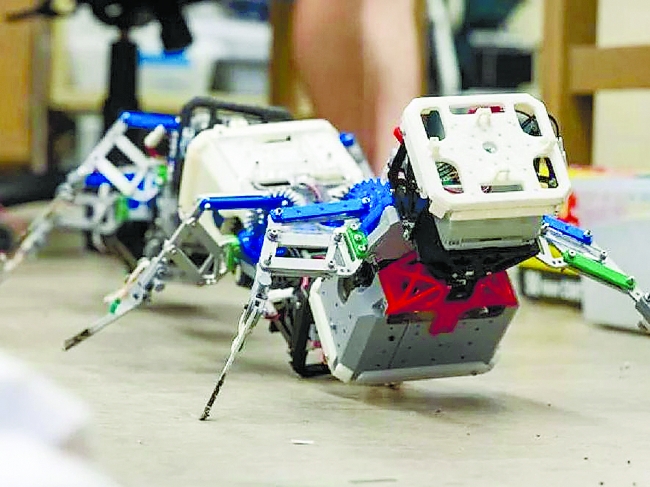
美國科研人員從蜈蚣的運動方式中得到靈感,研製出擁有多節身體和多條腿的機械人,能高效通過崎嶇不平的路面,不必依賴傳感器隨時探測路面情況。
美國佐治亞理工學院的研究人員說,他們開發出一個新的理論框架,推算節肢型機械人在崎嶇路面上的通行效率,並製造出不同規格的機械人進行試驗,發現腿比較多的機械人效率更高。根據這種設計思路,可望研製出適合農田作業和救災等場合的新型搜救機械人。相關論文發表在新一期美國《科學》雜誌上。
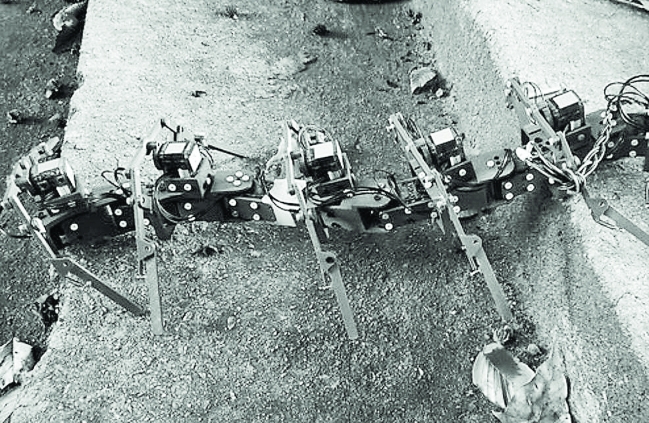
研究人員用3D打印技術製造小型的機械人身體,每節身體都有兩條腿並配備數台發動機,然後讓腿數不同的機械人反覆通過堆滿小方塊、高低不平的路面,從指定起點前往六十厘米遠處的終點。結果發現,僅有六條腿的機械人表現很不穩定,每次試驗耗費的時間差異較大;而有十四或十六條腿的機械人通行更加快速,而且每次耗費的時間差不多。此外,腿的長度和數量也會影響機械人的通行效率,這與蜈蚣的運動方式有很大的相似之處。
物理學院教授丹尼爾戈德曼說:“當你看到一隻蜈蚣在奔跑時,你看到的是一種生活在和我們不同的世界裡的動物。在我們的世界裡,運動的規則主要是慣性。例如,當我們擺動腿時,我們的腳會落地並向前移動。但是,在蜈蚣的世界裡,如果它們停止身體和四肢的擺動,它們就會立即停止移動。”根據這一特徵,佐治亞理工學院的物理學家、工程師和數學家團隊們開發了一種新的多足運動理論,並創建了多足機械人模型,發揮蜈蚣運動特性的優勢。
人類行走在崎嶇環境中時必須小心觀察,根據路面情況隨時作出反應,對機械人來說這就意味着需要配備大量傳感器,會大幅提高成本,而且傳感器在惡劣環境中很容易損壞。新型機械人將運動分段處理,不需要根據傳感器的實時探測來調整動作,更加高效實用。
該研究成果有望為農業生產和救災等領域提供新的解決方案。研究人員表示,這種機械人可以很好地適應各種複雜地形,比如農田、山區等地。在救災場合,這種機械人可以搜索和救援那些難以接觸的地區,還可以執行拯救被困人員的任務。因此,該研究成果將為未來的搜救機械人設計提供重要的參考和借鑒,有望推動科技進步並改善人們的生活。
月 比