生物混合機械人能做“剪刀手”
一個對人類來說很容易做到的“剪刀手”,生物混合機械人卻需要複雜的動作組合才能完成。日本東京大學和早稻田大學聯合團隊公佈了一項突破性成果:一種能夠移動物體並做出“剪刀手”手勢的生物混合機械手問世。這一創新為未來的生物混合義肢、藥物測試以及新型機械人的應用開闢了更大可能性。研究發表在新一期《科學 · 機械人學》雜誌上。
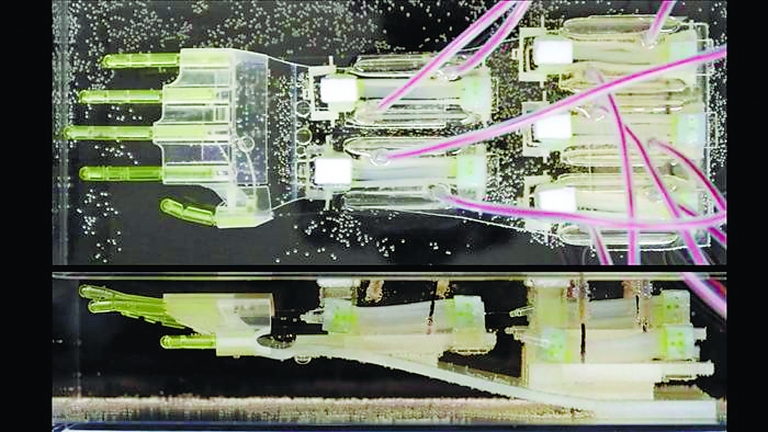
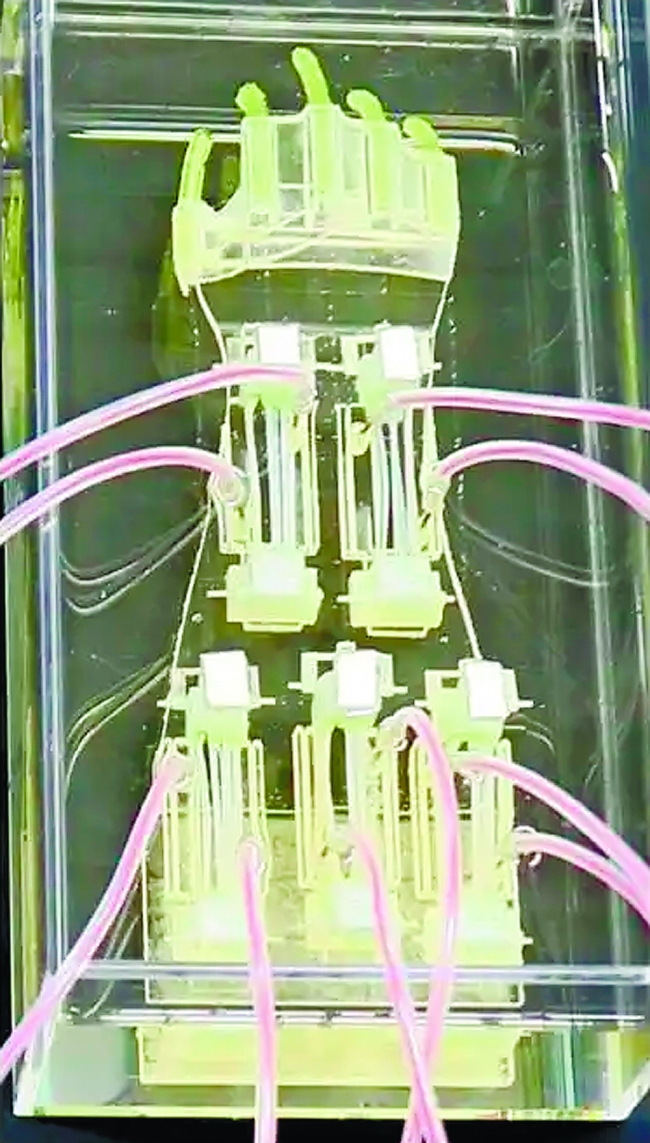
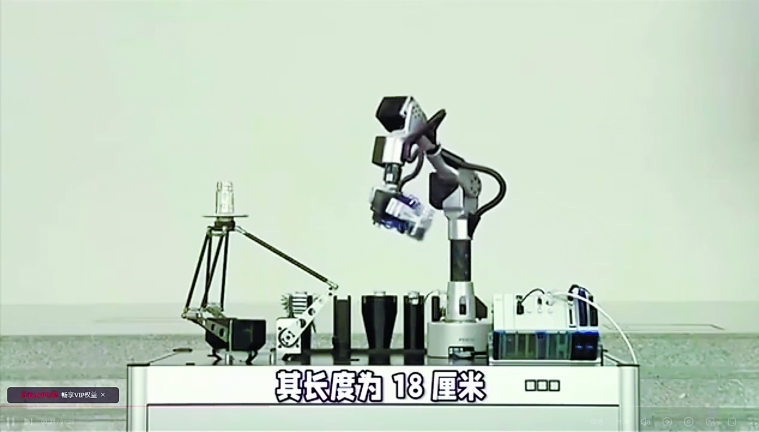
生物混合手由3D列印的塑膠底座製成,配備人體肌肉組織的肌腱,可以靈活地移動手指。以往的生物混合設備通常規模較小(約一厘米長),僅限於簡單的單關節運動。相比之下,這款生物混合手長十八厘米,具有多關節手指,可以單獨或組合移動以做出各種手勢或操縱物體。
該研究的核心成就在於開發了多肌肉組織致動器(MuMuTA)。這些細條肌肉組織在培養基中生長後,像壽司一樣捲成一束,形成每根肌腱,確保手指有足夠的力量進行收縮。通過防水電纜傳輸電流刺激這些肌肉,團隊成功地使手指執行了“剪刀手”手勢,還用手指抓住並移動了移液器的尖端,表明該手能夠模仿一系列複雜動作。其多關節手指可以單獨或同時彎曲,具有前所未有的靈活性。
最吸引人的是,研究小組發現,就像人手一樣,生物雜交模型在使用後也會“疲勞”,組織的力量會隨着時間的推移而下降。
東京大學的竹內正二說:“雖然並不完全令人驚訝,但有趣的是,在電刺激十分鐘後,組織的收縮力下降並出現疲勞跡象,但在休息一小時後就恢復了。在工程肌肉組織中觀察到這種與活體組織類似的恢復反應,是一個非凡而令人着迷的結果。”
竹內正二和他的團隊承認,他們的手實際上只是一個概念驗證,而不是一個可用的設備,在其功能增強之前還有很長的路要走。例如,在研究過程中,整隻手被漂浮在液體中,以便讓關節在盡可能少摩擦的情況下運動。懸浮液還能讓手的各個部分在被實驗室培育的肌腱彎曲後浮回中立位置,不過研究小組表示,增加彈性或更多反方向的MuMuTA可以克服這個問題。
MuMuTA目前僅限於實驗室環境,但其展示了在多個領域的潛力,包括幫助開發新型假肢、對肌肉組織進行藥物測試,並擴展生物混合機械人模仿真實形態的能力。儘管只是看似簡單的“石頭、剪刀、布”遊戲中的一個手勢,但它代表了生物混合體和義肢領域正向更高水平的真實感和可用性邁進,同時也展示了人們如何利用先進材料和技術,來創建更加逼真和功能強大的機械裝置,為未來的醫療和機械人技術帶來了新希望。
月 比