Arduino舵機
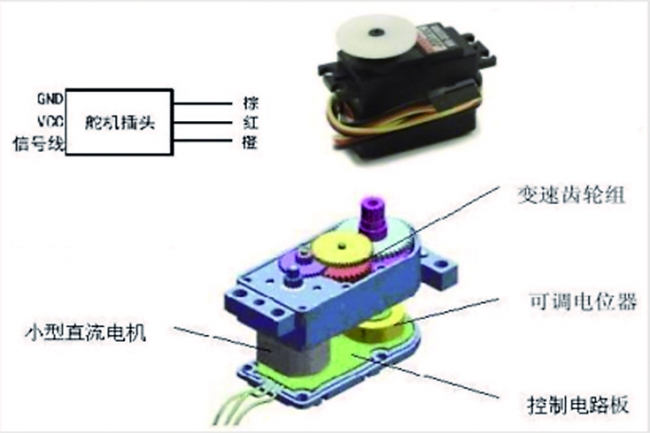
在Arduino的學習中,經常接觸到一個可以控制旋轉的零件——舵機。你可別看它體積不大、構造簡單、功能單一就小瞧它,它可一點都不簡單。
在我們生活中時常會出現舵機的身影,如在輪船、飛機等的方向舵中都有舵機的存在。這麼說,有可能大家都還不大了解。其實,在我們身邊的許多遙控玩具中,舵機已經得到了普遍地運用,如飛機、潛艇模型、遙控機器人中都運用到了舵機。簡單來說,舵機是一種角度位置伺服的驅動器,適用於那些需要角度不斷變化並可以保持的控制系統。主要是由外殼、電路板、無核心馬達、齒輪與位置檢測器所構成。舵機的內部由直流電機、位置電位器和驅動回饋電路板組成,當需要舵機轉到一定角度時,輸入信號會與標準信號比較。如果回饋位元置不是所需要的位置,電機則會朝向需要的方向轉動,直到轉到指定位置,電位器回饋資訊促使電機停止轉動。而不同的舵機的旋轉角度也是不同的,一般舵機旋轉的角度範圍是〇度到一百八十度。當然,在我們的生活中還存在着各種各樣的感測器,他們都各司其職的在努力工作。
施心娃 濠江 初三